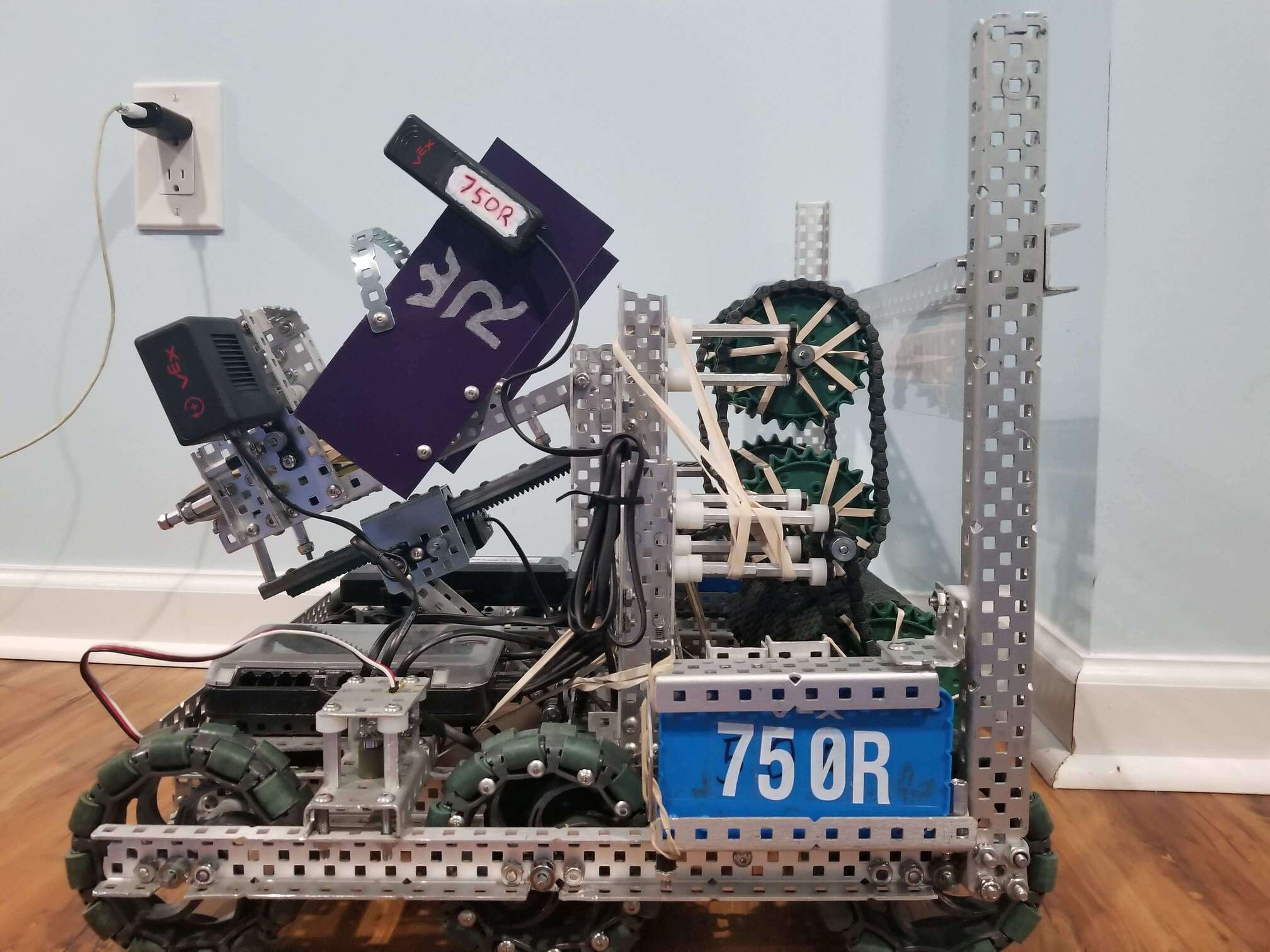
VEX Turning Point Robots
A robot containing a mechanism to intake and fire balls at targets at varying heights, a mechanism to flip over octagonal plastic "caps" and stack them on top of posts, and a robust drivetrain and main body that can drive up and on top of raised platforms.
Our team won two Build Awards and qualified to NJ State and World Championships for the 2018-19 season.
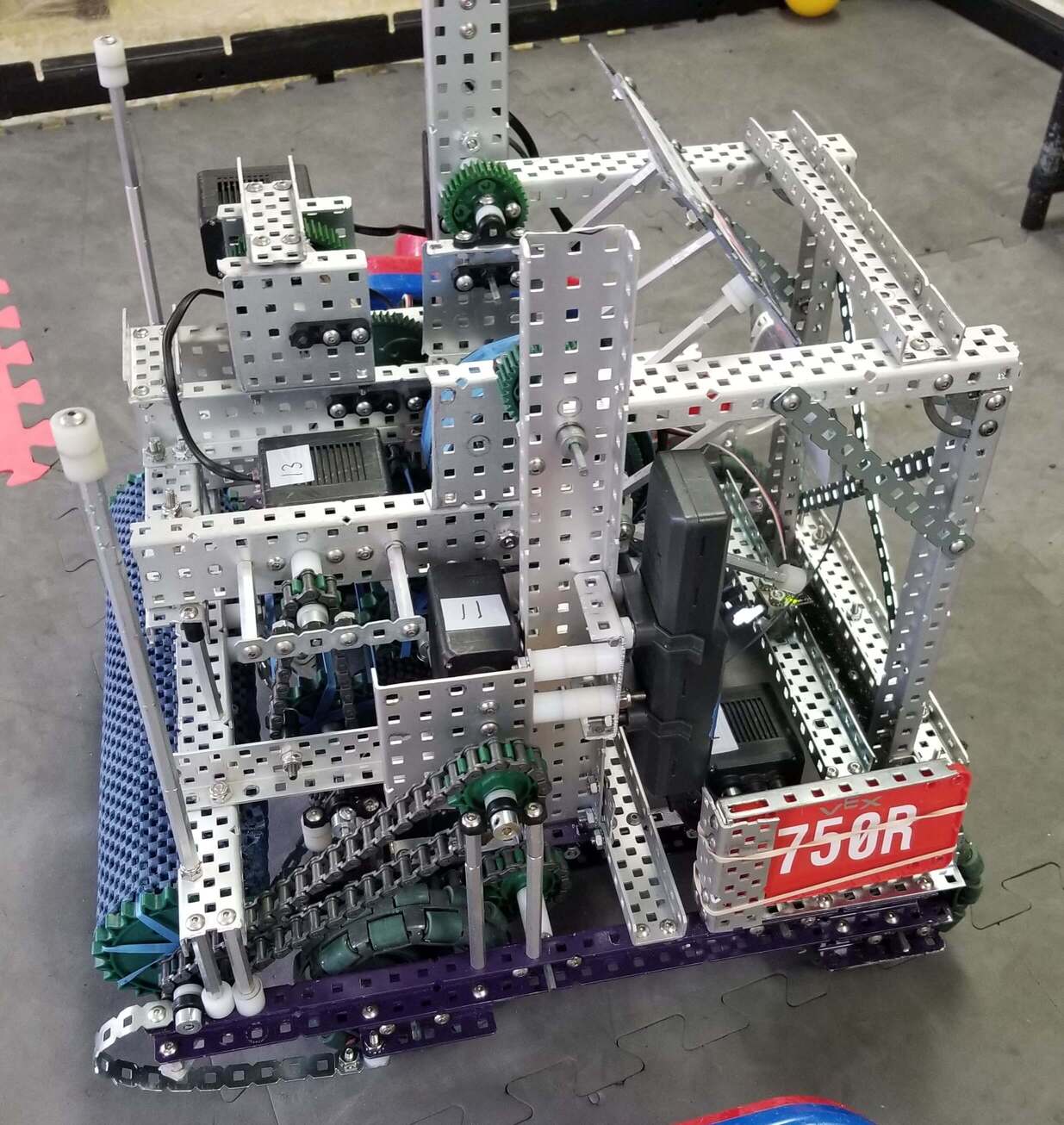
VEX Tower Takeover

A robot containing a mechanism to intake and store cubes, a mechanism to push the cube stacks out into the goal zones, and a lift to raise and place cubes into towers. I worked primarily on the 4-bar lift and the cube stack pushing mechanism.
Our team won a Create Award, qualified to State Championships, and were on track to qualify to World Championships which were cancelled by the COVID-19 pandemic.
Design Build Fly
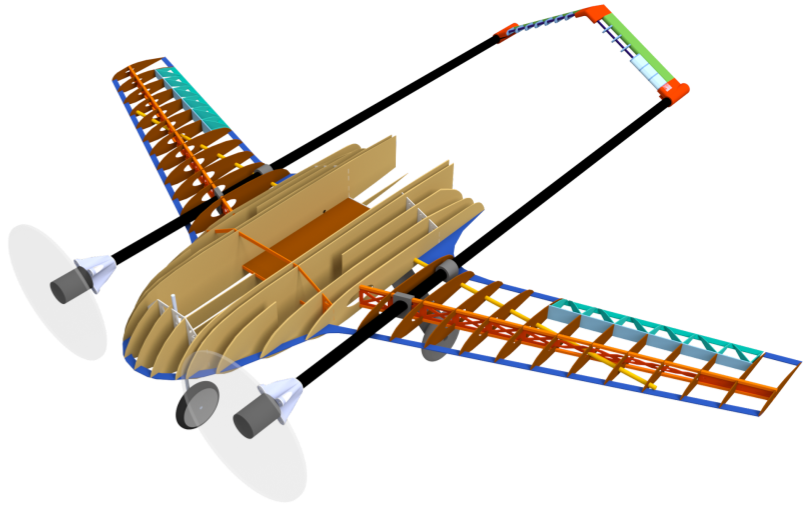
I was the structures subteam lead and currently serve as a mentor for Olin's DBF team. I supverise the design and fabrication of the competition plane, work with the rest of the leadership team on organizing tasks for the year, and help onboard new members into the structures subteam and the team as a whole.
3D Scanner
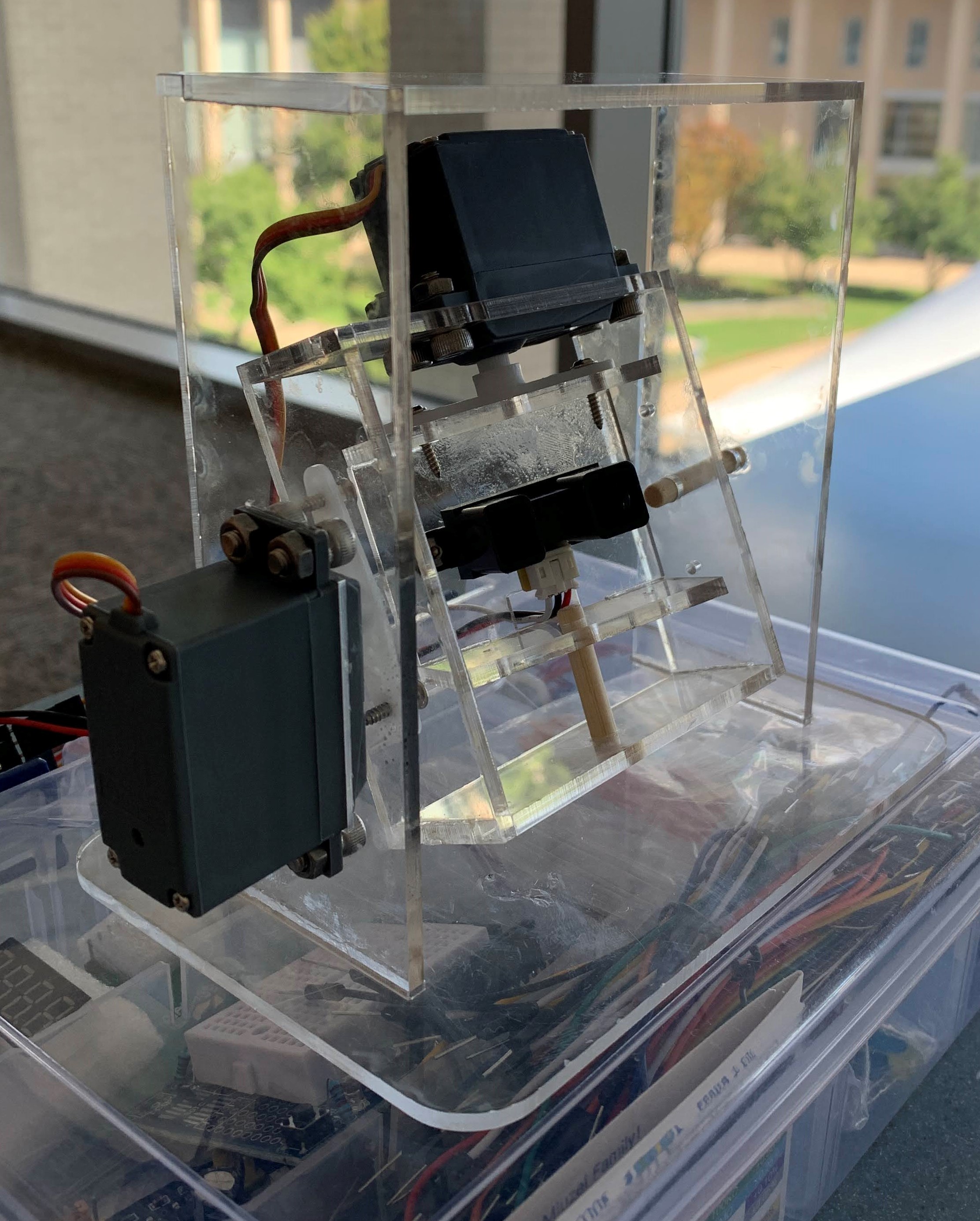
A pan-tilt mechanism with accompanying Arduino software for maneuvering an infrared (IR) sensor to scan objects in space. Created for the Principles of Integrated Engineering (PIE) class at Olin.
Hopper Project

A nature-inpsired simple mechanical device that can hop into the air, triggered by a passive mechanism. My design was inspried by the springtail, which uses a long tail to strike the ground and flip up into the air. This project was created for Design Nature, a first-year design class at Olin.
Play Experience Project
A nature inspired play experience for 4th graders at a local elementary school to try with their families.